

一文读懂直流电机控制算法
来源:安博电竞官网登录入口 发布时间:2024-02-20 15:42:03通常我们在控制小车运动的时候不知道怎么精确的对小车轨迹来控制。在不懂得小车控制算法精髓的时候,我
热线电话: 0574-62199590
产品视频
产品明细
通常我们在控制小车运动的时候不知道怎么精确的对小车轨迹来控制。在不懂得小车控制算法精髓的时候,我们是无法对小车进行精确的控制的。目前绝大多数小车都是用PID控制算法来实现对小车的运动控制的。现在很多玩家就只知道一种调节方法,就是比例调节,即向左偏就向右调节,向右偏就向左调节,最容易想到,也是最容易用软硬件实现的,但是结果也是最容易出问题的。当时的感觉就是小车太灵敏了,忽左忽右,不是很稳定。后来查了资料后知道了其他的调节方式。
电机控制算法的作用是接受指令速度值,通过运算向电机提供适当的驱动电压,尽快地和尽快平稳地使电机转速达到指令速度值,并维持这个速度值。换言之,一旦电机转速达到了指令速度值,即使在各种坏因(如斜坡、碰撞之类等使电机转速发生明显的变化的因素)的干扰下也应保持速度值不变。为了更好的提高机器人小车控制管理系统的控制精度,选用合适的控制算法显得十分必要。控制算法是任何闭环系统控制方案的核心,然而并非越复杂、精度越高的算法越好,因为比赛要求非常高的实时性,机器人必须在非常短的时间内作出灵敏的反应,所以现代的一些先进控制算法,比如模糊控制、神经元网络控制等就不可以应用到小车控制管理系统里。本系统选用了最常规、最经典的PID控制算法,通过实际应用取得了很好的效果。下图是PID控制原理结构图。

控制回路中的第一个偏差转换环节就是比例项。这一环节简单地将偏差信号乘以常数K 得到新的CV值(值域为-100~100)。基本的比例控制算法如下:
上一段程序中的SetPWM()函数并非将CV值作为绝对的PWM占空比来对待。否则,不断降低的偏差值会使输出值接近零,而且由于电机工作时需要持续的PWM信号,控制管理系统将会使电机稳定在低速运转状态上,因此导致控制管理系统策略失败。
相反,CV值一般被取作当前PWM占空比的改变量,并被附加到当前的PWM占空比上。这也要求SetPWM()函数必须将相加后得到的PWM占空比限制在0%~100%。正的CV值将使电机两端电压增加。负的CV值将使电机两端电压降低。如果CV值等于0,则无需改变但前占空比。较低的K 值会使电机的速度响应缓慢,但是却很平稳。较高的K 值会使速度响应更快,但是却可能会引起超调,即达到稳定输出前在期望值附近振荡。过高的K 值会导致系统的不稳定,即输出不断震荡且不会趋于期望值。
积分正好与微分相对。假如有一个描述变化率(微分)的表达式,那么对该表达式的积分就将得到随时间变化的原物理量。如加速度的积分是速度,速度的积分是位移。
在PID控制回路中,偏差的积分代表从控制开始时算起所有偏差积累的总和。该总和被常数K 所乘后再添加到回路输出中。在回路中,假如没有积分环节,尽管控制管理系统也会趋于稳定,但是由于某一些原因输出值可能最终也无法达到SP值。
由于积分项会慢慢的变大,这就会使控制回路在SP值的改变时响应变慢,某些应用场合在CV值达到取值边界(如为:-100~100)时会停止累加Isum。在SP值改变时,也可以除去Isum项。
任何变量的微分项被用来描述该变量是如何相对于另一个变量(多位时间)变化的。换句话说,任何变量的微分项就是它随时间的变化率。如位移随时间的变化率是速度。速度相对于时间的微分是加速度。
在PID控制器中,值得关心的是偏差信号相对于时间的微分,或称变化率。绝大多数控制器将微分项定义为:
式中,E为当前偏差,E 为前次偏差值,T为两次测量的时间间隔。负的变化率表明偏差信号的改善。当微分项被具体应用于控制器中时,将一个常数乘以该微分项,并将它加到比例项上,就能够获得最终的CV值计算公式:
当偏差信号接近零时,CV值将为负,所以当偏差信号开始改善时,微分项的作用将逐渐减弱校正输出量。在某一些场合下,微分项还有利于超调量的消除,并可以允许使用较大的K 值,从而能够改善响应的快速性。微分环节还预示了偏差信号的变化趋势。当控制对象对控制器的输出响应迟缓时,微分环节的作用尤为明显。
在整定PID控制器参数时,能够准确的通过控制器的参数与系统动态性能和稳态性能之间的定性关系,用实验的方法来调节控制器的参数。有经验的调试人员通常能较快地得到较为满意的调试结果。在调试中最重要的问题是在系统性能不能令人满意时,知道应该调节哪一个参数,该参数应该增大还是减小。
为了减少需要整定的参数,首先能够使用PI控制器。为了能够更好的保证系统的安全,在调试开始时应设置比较保守的参数,例如比例系数不要太大,积分时间不要太小,以防止系统不稳定或超调量过大的不正常的情况。给出一个阶跃给定信号,根据被控量的输出波形能够得到系统性能的信息,例如超调量和调节时间。应根据PID参数与系统性能的关系,反复调节PID的参数。
如果阶跃响应的超调量太大,经过多次振荡才能稳定或者根本不稳定,应减小比例系数、增大积分时间。如果阶跃响应没有超调量,但是被控量上升过于缓慢,过渡过程时间太长,应按相反的方向调整参数。
反复调节比例系数和积分时间,如果超调量仍然较大,能加入微分控制,微分时间从0逐渐增大,反复调节控制器的比例、积分和微分部分的参数。
总之,PID参数的调试是一个综合的、各参数互相影响的过程,实际调试过程中的多次尝试是很重要的,也是必须的。
试凑法就是人工选择PID参数,使控制管理系统响应达到预定要求,这种方法既简单又复杂,说简单是,如果你有经验和运气的话,那么在SIMULINK中,可能很快就达到了目标,说难的是,在现场实战中,可能费了很大时间和精力来调整三个参数,也没有完成任务。
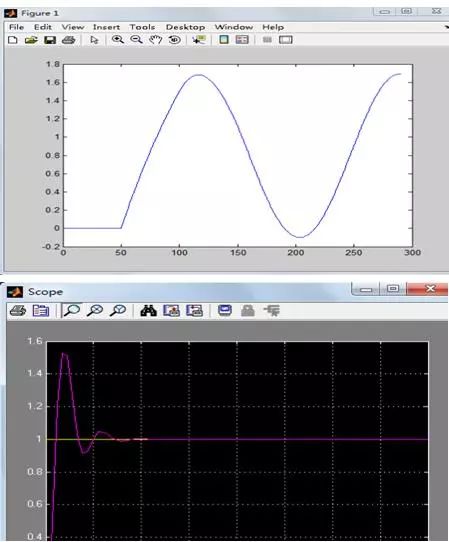
临界比例度法就是仅在P作用下,调整比例度使系统等幅振荡,然后根据公式算出PID值,效果如图1所示,图中左半部分是系统等幅振荡,右半部分是控制效果。下图是通过MATLAB仿真的PID临界比例度法控制的曲线 PID临界比例度法控制的曲线)衰减曲线法
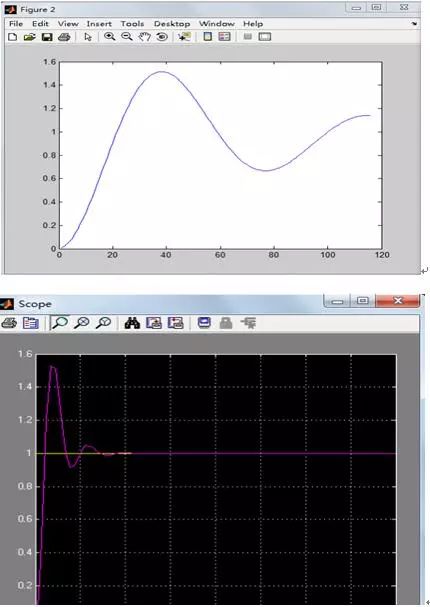
衰减曲线法 就是仅在P作用下,调整比例度使系统响应曲线比率衰减,然后根据公式算出PID值,效果如图2所示,图中左半部分是系统衰减曲线,右半部分是控制效果。下图是通过MATLAB 仿真的PID衰减曲线法控制的曲线 PID衰减曲线)反应曲线法
反应曲线法就是在开环状态下,加阶跃信号,然后用一阶加纯滞后系统逼近原系统,然后根据由Z-N或C-C公式算出PID值,效果如图3所示,图中左半部分是系统 响应曲线 , 右半部分是控制效果。图4是一个三阶系统,临界比例度法 求得的有关参数。下图是通过MATLAB 仿真的PID反应曲线法控制的曲线 PID反应曲线法控制的曲线

ACT Talk - 行业专家与孵化公司谈2017无人机产业新机会及方向
未来民用无人机有哪两大发展趋势? 燃油动力无人机能解决载荷与续航能力的瓶颈吗? 有像鸟一样扇动翅膀飞行的无人机吗? 政策监管加强给无人机市场带来了哪些新机会? 2015年以来,全球无人机行业呈现井喷式爆发,引得众多企业纷纷涌入,各种新品发布会和融资消息接连不断。但从2016年下半年开始,市场之间的竞争愈加激烈,当初满腔热血加入进来的企业们纷纷遭遇困境。在美国,无人机老大3DRobotics彻底退出无人机硬件市场,GoPro、Lily、Parrot等明星企业也在无人机市场纷纷折戟。在国内,亿航、零度等业内追捧的企业均在去年底经历了大幅裁员,2017年年初,西安无人机企业斯凯智能更是因资金链断裂破产倒闭...... 除了严酷无序的市
该电路采用NMOS场效应管作为功率输出器件, 设计并实现了较大功率的直流电机H 桥驱动电路,并对标称电压为24 伏, 额定电流为3.8A 的25D60-24A 直流电机进行闭环控制, 电路的抗干扰的能力强,在工业控制领域具有较强的适用性。许多半导体公司推出了直流电机专用驱动芯片, 但这些芯片多数只适合小功率直流电机, 对于大功率直流电机的驱动, 其集成芯片价格昂贵。 在直流电机驱动电路的设计中,主要考虑一下几点: 1. 功能:电机是单向还是双向转动?需不需要调速?对于单向的电机驱动,只要用一个大功率三极管或场效应管或继电器直接带动电机即可,当电机需要双向转动时,能够正常的使用由4 个功率元件组成的H 桥电路或者使用一个双刀双掷的继电器。如
驱动电路方案 /
简单的直流电机PWM调速电路 Simple DC motor PWM speed control The 555 is ubiquitous and can be used as simple PWM speed control Circuit Explaination: The 555 Ic is wired as an astable and the frequency is constant and independent of the duty cycle, as the total resistance (R charge + R discharge, notice the diode) is const
PWM调速电路 /
1 前言 随着汽车部件的电动化、自动化程度逐步的提升和对汽车电机的噪声、电磁兼容、效率的高要求,永磁无刷直流电机正在慢慢地替代有刷的永磁直流电机 。永磁无刷电机具有体积小、寿命长、效率高、结构相对比较简单、可靠性好等优点,利用它作为汽车部件的驱动执行元件可有效地提高汽车部件的性能。例如在Freightliner公司的M2系列商务车上,采用无刷电机驱动其空调系统的鼓风机,更好地调节了送风速度 。 由于汽车总线技术的日趋成熟,汽车内多个电机单元的控制方式正从传统的集中式线束控制向分布式总线控制转变。分布式总线控制能够大大减少线束,减少相关成本,便于各个电机控制单元和车内其它电控单元一起形成一个综合协调的控制管理系统,提高各控制单元的运行可靠性,减少
实验名称:直流电机实验 接线说明: 实验现象:下载程序后,直流电机旋转5S后停止 需要注意的几点:将直流电机两根线分别连接到“步进电机模块”输出端子J47的5V和O1上。 ***************************************************************************************/ #include reg52.h typedef unsigned int u16; //对系统默认数据类型进行重定义 typedef unsigned char u8; //定义直流电机控制管脚 sbit DC_Motor=P1^0; #define DC_MOTOR_RUN_TIME 5
C代码: /*************** writer:shopping.w ******************/ #include reg52.h #include intrins.h #define uint unsigned int #define uchar unsigned char sbit K1 = P3^0; sbit K2 = P3^1; sbit K3 = P3^2; sbit LED1 = P0^0; sbit LED2 = P0^1; sbit LED3 = P0^2; sbit MA = P1^0; sbit MB = P1^1; void main(void) { LED1 =
正反转 /
BLDC电机控制算法 无刷电机属于自换流型(自我方向转换),因此控制起来更复杂。 BLDC电机控制要求了解电机进行整流转向的转子位置和机制。对于闭环速度控制,有两个附加要求,即对于转子速度/或电机电流以及PWM信号做测量,以控制电机速度以及功率。 BLDC电机能够准确的通过应用要求采用边排列或中心排列PWM信号。大多数应用仅要求速度变化操作,将采用6个独立的边排列PWM信号。这就提供了最高的分辨率。如果应用要求服务器定位、能耗制动或动力倒转,推荐使用补充的中心排列PWM信号。 为了感应转子位置,BLDC电机采用霍尔效应传感器来提供绝对定位感应。这就导致了更多线的使用和更高的成本。无传感器BLDC控制省去了对于霍尔传感器的
及矢量控制 /
5.6 )SVPWM实现过程 从上节的分析可知,哪几个电压空间矢量和其作用的时间是SVPWM的两个根本的问题。要实现SVPWM,仿真搭建时必须要格外注意和解决的几个问题。 (1)、电压空间矢量所在扇区的判断; (2)、基本矢量作用时间的计算; (3)、基本矢量的作用顺序及扇区切换点时间确定。 只要解决以上3个问题,就能实现SVPWM。 下面我们用一个小例子来理解PWM信号。图2是一个直流电路,它有一个电阻,一个开关,一个灯泡,和一个驱动灯泡的10V直流电压源。我们如何能得到2.5V电压驱动下的灯泡亮度呢? 5.6.1 )SVPWM理论讲解 该状态对应的电机绕组连接图如下:
基础(下) /
FOC控制管理系统设计
(BLDC)控制
的简单
反电动势估计方法
MPS电机研究院 让电机更听话的秘密! 第一站:电机应用知识大考!跟帖赢好礼~
电源小课堂 从12V电池及供电网络优化的角度分析电动汽车E/E架构的趋势
解锁【W5500-EVB-Pico】,探秘以太网底层,得捷电子Follow me第4期来袭!
Microchip推出业界首款提供高达25 Gbps高速网络接口的 主时钟产品TimeProvider® 4500系列
进一步扩展旗下IEEE®-1588主时钟产品组合,可实现小于1纳秒的精确时间精度5G电信、电力设施和交通等关键基础设施细分市场的运营商需要利用 ...
电驱动系统在驱动新能源汽车行驶过程中,将电池包的电能转化成电机转动的动能。能量在转化过程中,损失的能量以热能的形式反映出来。车用电 ...
随着经济的加快速度进行发展,中国机动车保有量突破4 26亿辆,成为全世界机动车保有量最大的国家,汽车数量的飞速增加导致各类交通事故频发,造成大量 ...
电机控制器,作为电动汽车的核心部件之一,是汽车动力性能的决定性因素。它从整车控制器获得整车的需求,从动力电池包获得电能,经过自身逆 ...
01温度控制根据不同的国家 地区版本,客户能选择一区、两区或三区空调。客户还可以再一次进行选择是否为车辆配备热泵功能。乘员能够正常的使用前空调系统 ...

Omdia:2025 年 mini LED 电视出货量将到 2500 万台
MiR洞察:先进自动化技术助川渝制造业升级,智能产线物流技术成关键路径
贸泽电子开售u-blox XPLR-HPG-2探索套件 , 助力快速开发高精度GNSS应用
平头哥RVB2601开源应用方案征集来啊~100套板卡助阵,天猫精灵智能套装礼品组等你抱走~
Maxim 利用nanoPower创新技术,致力于降低系统的静态功耗 看视频答题赢好礼! 还有免费开发板等你拿
网站地图最新更新手机版站点相关:嵌入式处理器嵌入式操作系统开发相关FPGA/DSP
总线与接口数据处理消费电子工业电子汽车电子其他技术存储技术综合资讯论坛电子百科词云:

